Исследования Марса, проведенные целым рядом научных экспедиций к
четвертой планете Солнечной системы, убедительно доказали, что на его
поверхности присутствует вода, пусть и в твердом состоянии, а
марсианская почва по своим свойствам очень напоминает почву Земли. Это
делает «красную планету» очень заманчивой целью для колонизации –
значительная часть основных элементов для жизни на Марсе человека,
пусть и в несколько необычной форме, все же присутствует. Но первыми
колонистами, если не считать возможные пилотируемые экспедиции, станут
отнюдь не люди, а миниатюрные роботы.
Задачами первостепенной важности, которые будут возложены на
аппараты, станет не только разведка поверхности Марса на наличие тех
или иных элементов и пробы грунта по всей планете – роботы будут
строителями первых зданий и структур (в качестве основы будет выступать
именно грунт, а в качестве связующего вещества - вода), которые затем
смогут в относительно короткие сроки заселить поселенцы-люди. Именно
такими поистине фантастическими возможностями будут обладать
миниатюрные роботы, причем главной их особенностью станут не рекордная
грузоподъемность, мощность, либо скоростные характеристики, а
возможность совместной работы – наподобие сообществ земных насекомых:
муравьев, пчел и пр. А рассматривать идею не в качестве утопии, а как
вполне возможный сценарий заселения Марса помогают современные
разработки в области роботостроения, в частности, создание крошечных
роботов в рамках проекта I-SWARM.
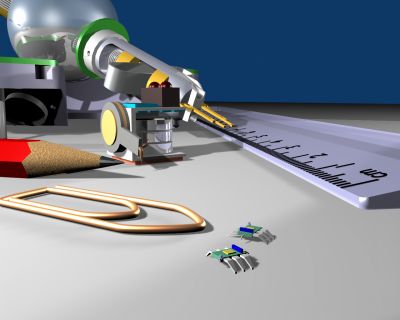
Казалось бы, что могут роботы, размеры которых едва превышают одного
квадратного сантиметра, однако именно за счет коллективного труда
аппараты могут поднимать и перемещать относительно тяжелые объекты, а
бортовой центральный процессор обрабатывает поступающую извне
информация для принятия наиболее эффективного решения. Помимо системы
обработки данных роботы I-SWARM будут оснащаться еще и сенсорами (для
получения данных об окружающей среде), коммуникационными устройствами
(для общения роботов между собой и передаче данных, необходимых для
совместной деятельности), а также автономным источником питания.
На сегодняшний день роботы обучены передвижению по ровной
поверхности, ориентации в пространстве – предотвращение столкновения с
препятствием, падения с высоты и пр. На стадии разработки находятся:
система питания роботов, которая представляет собой в том числе и
крайне миниатюрные и эффективные солнечные батареи, устройства
коммуникации роботов, состоящие из светоизлучающего диода, передающего
информацию, и фотодиода, получающего данные от собратьев. Что самое
интересное, все системы уже изготовлены в качестве опытных образцов и
показывают отличные результаты в плане работоспособности и
эффективности. Так, сигнал роботу передается в виде довольно мощных
световых импульсов, которые он принимает и отвечает на него в
инфракрасном диапазоне – жизнеспособность идеи сомнений вызывать не
должна. Исследуются и возможности роботов к организации совместных
действий, как путем математического моделирования, так и успешных
практических опытов.
Что касается механизма передвижения аппаратов, то здесь
предлагаются два варианта развития событий – либо создание роботов,
передвигающихся при помощи колес, что повышает скоростные показатели,
либо при помощи вибрации. В последнем случае аппараты заметно уступают
в скорости передвижения, однако существенно выигрывают в миниатюрности,
и их габаритные размеры не превышают трех миллиметров.
Пока точно говорить о возможности заселения Марса колониями
роботов преждевременно, однако усилия разработчиков вряд ли пропадут
даром – в случае успеха роботы I-SWARM в обязательном порядке найдут
себе работу на Земле, и область их применения поистине безгранична – от
научных исследований до разведывательных и спасательных операций.
|











 |
|

